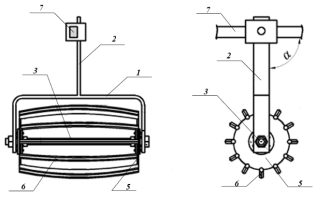
This article provides a comprehensive theoretical basis for determining the structural and technological parameters of a roller-type working body, which is specifically designed to loosen the crust that forms on the inter-row soil of cotton crops. The formation of a dense soil crust in cotton fields negatively affects the emergence and growth of seedlings, leading to uneven plant development and potentially reduced crop yields. To mitigate these negative effects and ensure uniform and complete emergence of cotton seedlings, this study focused on identifying key operational parameters of the roller. Among these parameters are the depth of soil penetration by the roller, the large and small diameters of the roller, the number of hexagonal prongs installed on the roller surface, the magnitude of the vertical load applied during operation, and the tension force of the pressure spring that regulates the roller’s interaction with the soil. Based on rigorous theoretical research and analysis, the optimal values of the roller's geometric and force parameters were established. These optimal values are determined under the condition that the crust is completely and efficiently loosened while minimizing energy expenditure and mechanical stress on the roller components. The study also takes into account the interaction between the roller and varying soil types, ensuring that the roller’s design is versatile and capable of maintaining high-quality performance under diverse field conditions. The findings of this study have practical significance for the improvement of working bodies used in cotton cultivation, particularly for cultivators and other soil-processing machinery. By applying the determined parameters, agricultural engineers and practitioners can enhance the operational efficiency of their equipment, reduce labor and energy costs, and achieve better soil preparation for cotton seedlings. Furthermore, this research contributes to the development of energy- and resource-efficient agricultural technologies, supporting sustainable farming practices. The results serve as a scientific foundation for future design improvements and technological advancements in soil cultivation machinery, ensuring that both productivity and quality are maximized in cotton production.
| Published in | Science Discovery Physics (Volume 1, Issue 2) |
| DOI | 10.11648/j.sdp.20260102.12 |
| Page(s) | 102-107 |
| Creative Commons |
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited. |
| Copyright |
Copyright © The Author(s), 2026. Published by Science Publishing Group |
Soil Crust, Roller-harrow, Working Body, Cotton Seedling, Soil Tillage, Cultivator, Hexagonal Bar, Vertical Load
 (1)
(1)  (2)
(2)  are the angles of friction of the plant stems against the hexagonal bars of the roller and the soil crust, respectively;
are the angles of friction of the plant stems against the hexagonal bars of the roller and the soil crust, respectively;  (3)
(3)  (4)
(4)  = 30;
= 30;  = 32, dp = 0.02 m, h = 0.05 m, and he = 0.04 m, calculations based on expressions (2) and (4) indicate that the small diameter of the roller should be 25 cm, and the large diameter should be 31 cm. Correspondingly, the small radius of the roller must be 12.5 cm and the large radius must be 15.5 cm.
= 32, dp = 0.02 m, h = 0.05 m, and he = 0.04 m, calculations based on expressions (2) and (4) indicate that the small diameter of the roller should be 25 cm, and the large diameter should be 31 cm. Correspondingly, the small radius of the roller must be 12.5 cm and the large radius must be 15.5 cm.  (5)
(5) 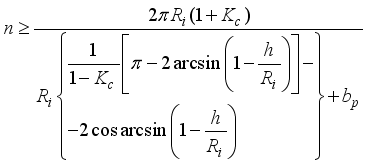 (6)
(6)  = 0.125 - 0.155 m,
= 0.125 - 0.155 m,  = 0.2, h = 0.05, and bp = 0.014 m into this formula, we determine that the number of rods to be installed on the gin roller should be 10-12.
= 0.2, h = 0.05, and bp = 0.014 m into this formula, we determine that the number of rods to be installed on the gin roller should be 10-12.  (7)
(7)  is the coefficient of static soil compression, in N/m3;
is the coefficient of static soil compression, in N/m3;  - coefficient of proportionality, s2/m2;
- coefficient of proportionality, s2/m2;  - average penetration depth of the roller's hexagonal rod into the soil crust, m.
- average penetration depth of the roller's hexagonal rod into the soil crust, m.  (8)
(8)  (9)
(9)  (10)
(10)  (11)
(11)  (12)
(12)  ,
,  , and
, and  are the coefficients;
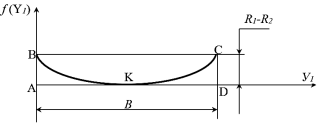
are the coefficients;  - is the horizontal coordinate axis oriented perpendicular to the rows where cotton seeds are planted, m.
- is the horizontal coordinate axis oriented perpendicular to the rows where cotton seeds are planted, m.  = 0, we have
= 0, we have  ; when Y1 = 0.5B, we have
; when Y1 = 0.5B, we have  ; and when Y1 = B, we have
; and when Y1 = B, we have  . Using these conditions, we obtain the following equations to determine
. Using these conditions, we obtain the following equations to determine  ,
,  ,
,  .
.  (13)
(13)  (14)
(14)  (15)
(15)  (16)
(16)  (17)
(17)  (18)
(18)  (19)
(19)  into expression (11), we find S2.
into expression (11), we find S2.  (20)
(20)  (21)
(21)  (22)
(22)  (23)
(23)  = 5·106 N/m3,
= 5·106 N/m3,  = 0.01 s2/m2,
= 0.01 s2/m2,  = 0.155 m,
= 0.155 m,  = 0.125 m, bp = 0.014 m, and B = 0.50 m into this expression, we determine that for the ridge roller to operate at the specified depth at a travel speed of 1.7 - 2.2 m/s, the vertical load applied to it must be within the range of 949 - 954 N.
= 0.125 m, bp = 0.014 m, and B = 0.50 m into this expression, we determine that for the ridge roller to operate at the specified depth at a travel speed of 1.7 - 2.2 m/s, the vertical load applied to it must be within the range of 949 - 954 N.  (24)
(24)  (25)
(25)  (26)
(26)  is the angle of deviation from the horizontal of the parallelogram mechanism's longitudinal rods;
is the angle of deviation from the horizontal of the parallelogram mechanism's longitudinal rods;  (27)
(27)  =
=  (where
(where  is the rolling resistance coefficient of the roller)
is the rolling resistance coefficient of the roller)  (28)
(28) 
 (29)
(29)  ,
,  ,
,  ,
,  ,
,  , bp, and B into this expression, and assuming
, bp, and B into this expression, and assuming  =0.2,
=0.2,  =10, and m=62 kg, we determine that for the roller-equipped parallelogram mechanism to operate at the specified depth at speeds of 1.7-2.2 m/s, the tension force of its pressure spring must be within the range of 353-358 N.
=10, and m=62 kg, we determine that for the roller-equipped parallelogram mechanism to operate at the specified depth at speeds of 1.7-2.2 m/s, the tension force of its pressure spring must be within the range of 353-358 N.
| Angle of Deviation from the Horizontal of the Parallelogram Mechanism's Longitudinal Rods |
| [1] |
International Cotton Advisory Committee. ICAC. Available from:
https://icac.org (accessed 6 March 2026). |
| [2] | Goryachkin, V. P. Theory of the Drum. Collected Works. 1965, 3, 153–172. |
| [3] | Pustygin M. A. Theory and Technological Calculation of Threshing Devices. — Moscow: 1948. — 95 pages. |
| [4] | Kolganov K. G., Chetyrkin B. N., Votsky Z. I. Combines for Two-Phase Threshing of Grain Crops. — Chelyabinsk, 1971. — 295 pages. |
| [5] | Akhmetov A. A. Development of a Combined Machine with a Rotary Working Body for Pre-Sowing Tillage on Saline Soils: DSc (Technical Sciences) Dissertation Abstract. – Tashkent: Tashkent Institute of Irrigation and Agricultural Mechanization Engineers, 2015. – 76 p. |
| [6] | Aminov S. A. Substantiation of the Parameters of a Compaction Roller for a Pre-Sowing Implement in Cotton Growing: PhD (Technical Sciences) Dissertation. – Yangiyul, 1988. – 130 p. |
| [7] | Inoyatov I. A. Substantiation of the Parameters of the Crushing-Compacting Working Body of a Rotary Non-Driven Loosener: Abstract of PhD (Technical Sciences) Dissertation. – Yangiyul, 1997. – 18 p. |
| [8] | Boboev U. P. Substantiation of the Parameters of a Support-Leveling Roller for a Frontal Plow: Abstract of PhD (Technical Sciences) Dissertation. – Tashkent, 2008. – 18 p. |
| [9] | Mamarasulova M. T. Substantiation of the Type and Parameters of a Sequential Tillage Roller Machine for Ploughed Fields: PhD Dissertation. – Yangiyol, 2021. – 157 p. |
| [10] | Eshmatova G. Q. Substantiation of the Type and Parameters of a Tandem Roller Used in Combined Machines: PhD Dissertation. – Yangiyol, 2022. – 126 p. |
| [11] | Artikbaev B. P. Development of a Disc Working Body for a Cotton Cultivator to Loosen Soil Crust and Substantiation of Its Parameters (Under the Conditions of the Republic of Karakalpakstan): PhD (Technical Sciences) Dissertation. – Tashkent, 2019. – 179 p. |
| [12] | Tuxtakuziev A., Khudoyarov B., Utepbergenov B., Kengesbaev R. Theoretical Substantiation of the Parameters of a Roller of a Combined Machine // Bulletin of the Karakalpakstan Branch of the Academy of Sciences of the Republic of Uzbekistan. – Nukus, 2018. – No. 2. – pp. 16–18. |
| [13] | Sineokov G. N., Panov I. M. Theory and Calculation of Soil-Tilling Machines. – Moscow: Mashinostroenie, 1977. – 328 p. |
| [14] | N. H. Abdualiev, N. M. Egamov The importance of softening the thicket formed between rows of cotton// Agriculture and water management of Uzbekistan. Magazine issue 10, 2022. – p. 25–26. |
| [15] | N. M. Murodov N. H. Abdualiyev. Improvement of the device for longitudinal floor picking between cotton rows. Bukhara–2019 republican scientific–theoretical conference on the topic of increasing the efficiency of the rational use of water and land resources. – p. 4–7. |
APA Style
Egamov, N. (2026). Theoretical Substantiation of the Parameters of a Roller-leveller for Soil Crust Softening. Science Discovery Physics, 1(2), 102-107. https://doi.org/10.11648/j.sdp.20260102.12
ACS Style
Egamov, N. Theoretical Substantiation of the Parameters of a Roller-leveller for Soil Crust Softening. Sci. Discov. Phys. 2026, 1(2), 102-107. doi: 10.11648/j.sdp.20260102.12
@article{10.11648/j.sdp.20260102.12,
author = {Nodirbek Egamov},
title = {Theoretical Substantiation of the Parameters of a
Roller-leveller for Soil Crust Softening},
journal = {Science Discovery Physics},
volume = {1},
number = {2},
pages = {102-107},
doi = {10.11648/j.sdp.20260102.12},
url = {https://doi.org/10.11648/j.sdp.20260102.12},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.sdp.20260102.12},
abstract = {This article provides a comprehensive theoretical basis for determining the structural and technological parameters of a roller-type working body, which is specifically designed to loosen the crust that forms on the inter-row soil of cotton crops. The formation of a dense soil crust in cotton fields negatively affects the emergence and growth of seedlings, leading to uneven plant development and potentially reduced crop yields. To mitigate these negative effects and ensure uniform and complete emergence of cotton seedlings, this study focused on identifying key operational parameters of the roller. Among these parameters are the depth of soil penetration by the roller, the large and small diameters of the roller, the number of hexagonal prongs installed on the roller surface, the magnitude of the vertical load applied during operation, and the tension force of the pressure spring that regulates the roller’s interaction with the soil. Based on rigorous theoretical research and analysis, the optimal values of the roller's geometric and force parameters were established. These optimal values are determined under the condition that the crust is completely and efficiently loosened while minimizing energy expenditure and mechanical stress on the roller components. The study also takes into account the interaction between the roller and varying soil types, ensuring that the roller’s design is versatile and capable of maintaining high-quality performance under diverse field conditions. The findings of this study have practical significance for the improvement of working bodies used in cotton cultivation, particularly for cultivators and other soil-processing machinery. By applying the determined parameters, agricultural engineers and practitioners can enhance the operational efficiency of their equipment, reduce labor and energy costs, and achieve better soil preparation for cotton seedlings. Furthermore, this research contributes to the development of energy- and resource-efficient agricultural technologies, supporting sustainable farming practices. The results serve as a scientific foundation for future design improvements and technological advancements in soil cultivation machinery, ensuring that both productivity and quality are maximized in cotton production.},
year = {2026}
}
TY - JOUR T1 - Theoretical Substantiation of the Parameters of a Roller-leveller for Soil Crust Softening AU - Nodirbek Egamov Y1 - 2026/03/19 PY - 2026 N1 - https://doi.org/10.11648/j.sdp.20260102.12 DO - 10.11648/j.sdp.20260102.12 T2 - Science Discovery Physics JF - Science Discovery Physics JO - Science Discovery Physics SP - 102 EP - 107 PB - Science Publishing Group UR - https://doi.org/10.11648/j.sdp.20260102.12 AB - This article provides a comprehensive theoretical basis for determining the structural and technological parameters of a roller-type working body, which is specifically designed to loosen the crust that forms on the inter-row soil of cotton crops. The formation of a dense soil crust in cotton fields negatively affects the emergence and growth of seedlings, leading to uneven plant development and potentially reduced crop yields. To mitigate these negative effects and ensure uniform and complete emergence of cotton seedlings, this study focused on identifying key operational parameters of the roller. Among these parameters are the depth of soil penetration by the roller, the large and small diameters of the roller, the number of hexagonal prongs installed on the roller surface, the magnitude of the vertical load applied during operation, and the tension force of the pressure spring that regulates the roller’s interaction with the soil. Based on rigorous theoretical research and analysis, the optimal values of the roller's geometric and force parameters were established. These optimal values are determined under the condition that the crust is completely and efficiently loosened while minimizing energy expenditure and mechanical stress on the roller components. The study also takes into account the interaction between the roller and varying soil types, ensuring that the roller’s design is versatile and capable of maintaining high-quality performance under diverse field conditions. The findings of this study have practical significance for the improvement of working bodies used in cotton cultivation, particularly for cultivators and other soil-processing machinery. By applying the determined parameters, agricultural engineers and practitioners can enhance the operational efficiency of their equipment, reduce labor and energy costs, and achieve better soil preparation for cotton seedlings. Furthermore, this research contributes to the development of energy- and resource-efficient agricultural technologies, supporting sustainable farming practices. The results serve as a scientific foundation for future design improvements and technological advancements in soil cultivation machinery, ensuring that both productivity and quality are maximized in cotton production. VL - 1 IS - 2 ER -
Department of Civil Engineering, Bukhara Engineering-Technological Institute, Bukhara, Uzbekistan
Biography: Nodirbek Murodillaevich Egamov is an independent researcher at Bukhara State Technical University. He conducts scientific research in the field of agricultural machinery. To date, more than 10 scientific articles have been published in this area.
Research Fields: Development and justification of the parameters of a working organ with a color softener for a cotton cultivator

Information


 ,
,  ,
,  of equation (
of equation ( ,
,  and
and  , expression (
, expression (